Remote Control Method With Force Assist Based on Time to Collision for Mobile Robot
Authors: Ryo Masaki, Naoki Motoi, Masato Kobayashi
Abstract:
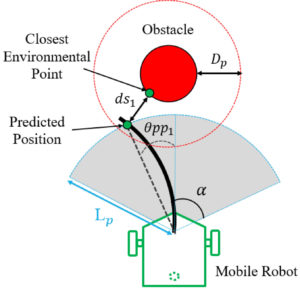
This paper proposes a remote control method with the force assist to improve the operability of a mobile robot. The force feedback is generated on the basis of the time to collision (TTC) and translational velocity. The TTC is calculated from the predicted trajectory and environmental information, and is used as an indicator of the possibility of collision. If the possibility of collision is low, the force assist is not implemented. Therefore, the operator can control the mobile robot with a low manipulation force. On the contrary, if the collision possibility is high, the force assist is implemented. This force assist is classified on the bases of two cases according to the translational velocity. In the case of the low translational velocity, collision avoidance can be achieved via modification of the angular velocity alone. As a result, the proposed method generates a force assist for the angular velocity alone. On the contrary, if the translational velocity is high, it is necessary to modify both the translational and angular velocities to avoid collision. In this case, a force assist is generated for both velocities. Finally, the operability improvement resulting from the proposed method is confirmed experimentally.
IEEE 2019 International Conference on Mechatronics (ICM) – Best IEEE Industrial Electronics Society conference paper award.
Check full paper at: https://ieeexplore.ieee.org/document/8722932