Bilateral Control-Based Imitation Learning for Velocity-Controlled Robot
Author: Sho Sakaino
Extended abstract:
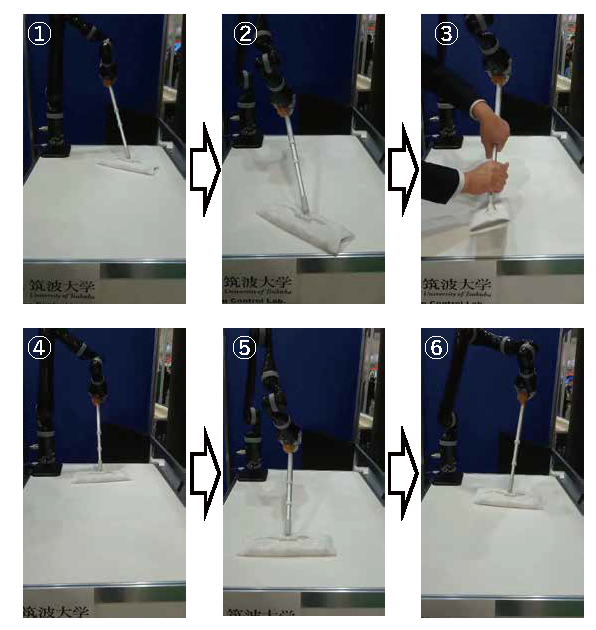
Machine learning is now playing important role in robotic object manipulation. In addition, force control is necessary for manipulating various objects to achieve robustness against perturbations of configurations and stiffness. The author’s group revealed that fast and dynamic object manipulation with force control can be obtained by bilateral control-based imitation learning. In this method, operators’ skills including force control can be imitated by using neural networks. However, the method is applicable only in robots that can control torque, while it is not applicable in robots that can only follow position or velocity commands like many commercially available robots. Then, in this research, a way to implement bilateral control-based imitation learning to velocity-controlled robots is proposed. In the proposed method, torque references of bilateral control-based imitation learning are transformed into velocity commands by using an admittance control-like procedure. The validity of the proposed method is experimentally verified by a mopping task, and a robot could continue to operate even if the length of a mop was suddenly changed.
2022 Best IEEE Industrial Electronics Society Conference Paper Award (paper presented at 2021 IEEE International Symposium on Industrial Electronics (ISIE)
Check full paper at: https://ieeexplore.ieee.org/document/9576326