Nonlinear Control of Underactuated Systems Subject to Both Actuated and Unactuated State Constraints With Experimental Verification
Authors: He Chen; Ning Sun
Extended Abstract:
Currently, underactuated systems are widely utilized in our daily life, which have the property that there are fewer control inputs than the to-be-controlled degrees of freedom (DOFs). Compared with fully-actuated systems, since fewer actuators are needed, underactuated systems have many advantages. However, because fewer control inputs are used to dominate more DOFs, the control issues of underactuated systems are usually much more challenging than those of fully-actuated systems. In practice, due to limited workspace or safety concerns, the state variables of underactuated systems should be constrained within allowable ranges. For instance, when a crane system transports liquid cargoes, swing angle amplitudes should never exceed a certain safety limit. If these state constraints are roughly neglected, the correspondingly designed control methods may be invalid in some situations.
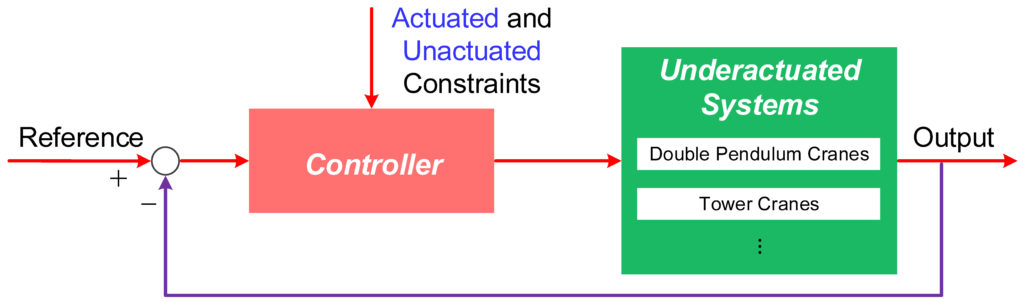
In this paper, we propose a new control strategy for a class of underactuated systems, which can treat various constraints, including actuated and unactuated state constraints and the constraints on some specific composite variables. Specifically, we elaborately design some new auxiliary terms that are composed of constrained variable signals and actuated velocity signals. These terms can enhance the couplings between unactuated and actuated state variables, which are further utilized to tackle the unactuated state and composite variable constraints. Then, the performance of the designed method is proven by rigorous analysis. Finally, the proposed method is applied to a double pendulum crane system and a tower crane system to verify its superior performance by experiments.
Authors’ Biographies:
He Chen received the Ph.D. degree from Nankai University, Tianjin, China, in 2018, and he is currently an Associate Professor with the School of Artificial Intelligence, Hebei University of Technology, Tianjin, China.
Ning Sun, who is the corresponding author of this paper, is currently a Professor with the Institute of Robotics and Automatic Information Systems, Nankai University, Tianjin, China, where he is also in charge of the Underactuated Robots Lab (URL).
Since 2013, they have been carrying out collaborative research on the control of underactuated systems.