Approximation-Free Robust Synchronization Control for Dual-Linear-Motors-Driven Systems With Uncertainties and Disturbances
Authors: Zhitai Liu, Weiyang Lin, Xinghu Yu, Juan J. Rodríguez-Andina, Huijun Gao
Abstract:
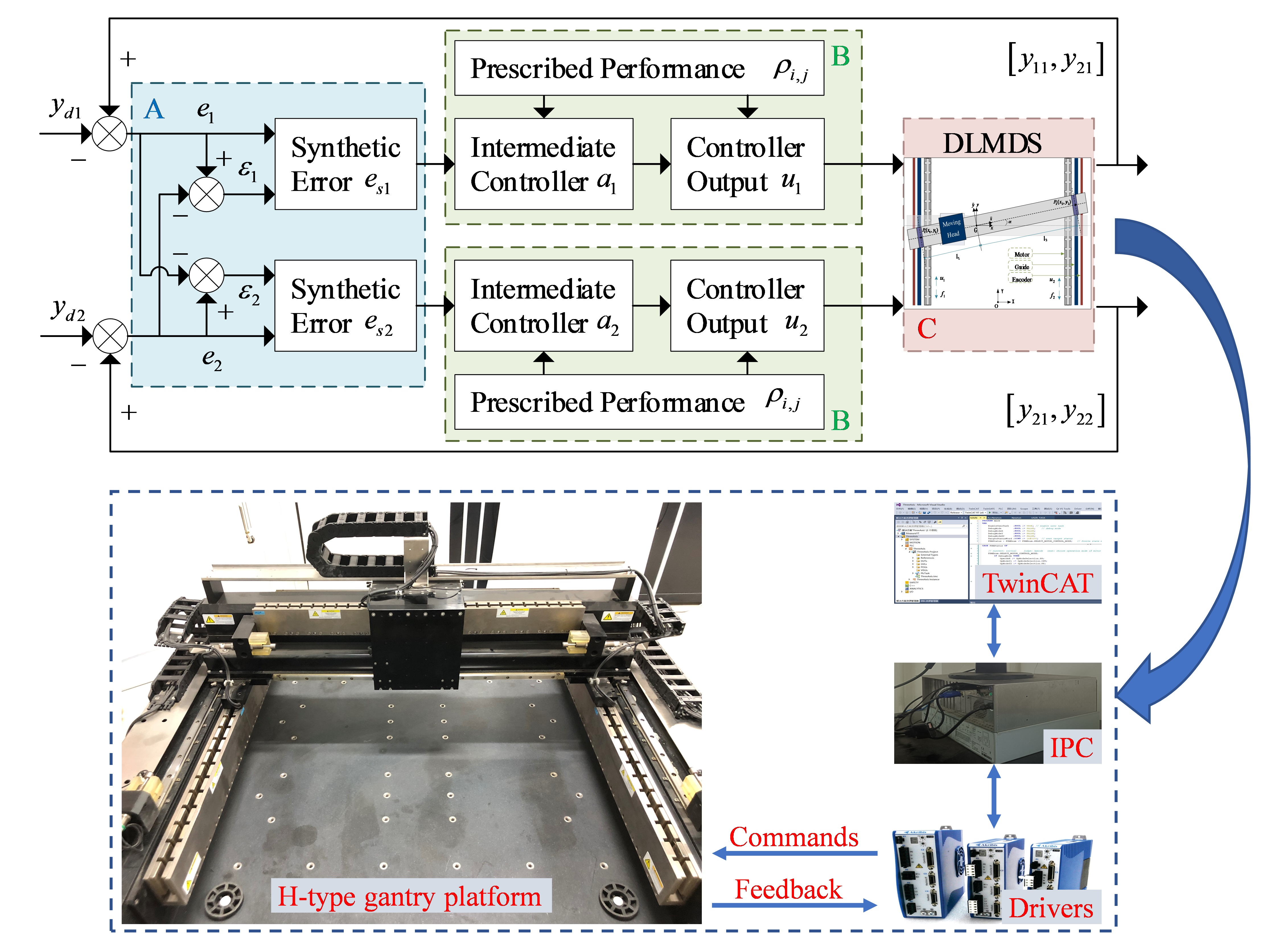
The dual-linear-motors-driven system (DLMDS) has been increasingly employed in various high-end manufacturing equipment, such as pick-and-place machines, high-end CNC machine tools, and precision instruments, owing to its advantages of high thrust, high precision, and fast response. The complex synchronous structure of the DLMDS increases the difficulty associated with achieving precision control, particularly in terms of synchronization accuracy, thereby imposing stringent demands on control algorithms. This paper presents an approximation-free robust synchronization control scheme that incorporates prescribed performance constraints to attain precise control. Initially, a synthetic error that can simultaneously describe tracking accuracy and synchronization accuracy is formulated to facilitate controller design by using cross-coupling control. Subsequently, a robust controller is devised, featuring prescribed transient and steady-state performance, amalgamating the advantages of prescribed performance control and back-stepping control. Importantly, the proposed scheme obviates the need for explicit model information or any approximation techniques to handle system uncertainties, such as identification, observers, and intelligent learning, thereby significantly reducing the complexity of the controller. By appropriately selecting performance functions, the transient and steady-state responses of the synthetic error can be constrained, thereby achieving the desired control performance. Notably, the prescribed performance is independent of the system model, thereby augmenting the robustness of the control scheme. Furthermore, the proposed control scheme does not rely on high-order derivatives of the desired trajectory, which are often challenging to obtain directly in numerous applications. This characteristic further extends the applicability of the proposed control scheme. Finally, experimental validations are conducted on an H-type gantry platform, where different controllers are tested, effectively demonstrating the efficacy and advantages of the proposed control scheme.