Distributed Hierarchical Control for Fast Frequency Restoration in VSG-Controlled Islanded Microgrids
Authors: Kuo Feng, Chunhua Liu
Abstract:
As microgrids develop rapidly, more inverters are adopted to achieve DC/AC or AC/DC/AC conversion of distributed generators (DGs). Replacing the large rotary generators with inverter-based sources results in a lack of inertia in the grid. The virtual synchronous generator (VSG) control has been proposed to replace the traditional droop control for inverters to provide virtual inertia. In order to restore the frequency to its nominal value, most existing secondary frequency control (SFC) methods are based on frequency measurements. However, while reducing the rate of change of frequency (ROCOF), virtual inertia also slows down the convergence of frequency-based SFC.
Therefore, this paper proposes a distributed hierarchical control to generate multi-rate sampling control signals for inverters to achieve stable and fast frequency restoration. The VSG control is adopted to compensate for inertia. Without communication, fast-sampled digital signals control the switch of IGBTs to achieve frequency droop and power sharing. Based on the VSG primary control, a novel distributed event-triggered frequency restoration algorithm is proposed. With highly reduced communication triggers, the power references generated by the proposed control can accelerate the frequency restoration. The low-sampled signal broadcast avoids the influence of frequent and un-convergent control signals.
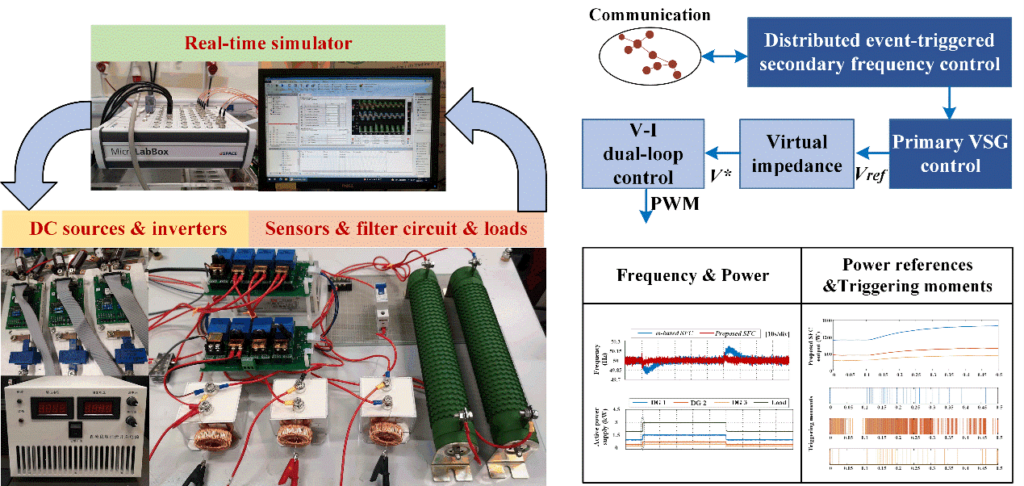
In order to guarantee the effectiveness, reliability, and practicability of the proposed control, both the simulation and experiment validation are operated. Based on the accurate performance of simulations in MATLAB/Simulink environment, the proposed control has also been tested on the experiment platform, which contains practical DC suppliers, DC/AC conversion circuits, AC loads, sensors, and the real-time controller. The experiment results finally corroborate the feasibility of the proposed control method.