Hierarchical Abstraction of Compensator for Reaction Torque Observer Based on Element Description Method
Authors: Issei Takeuchi and Seiichiro Katsura
Extended Abstract:
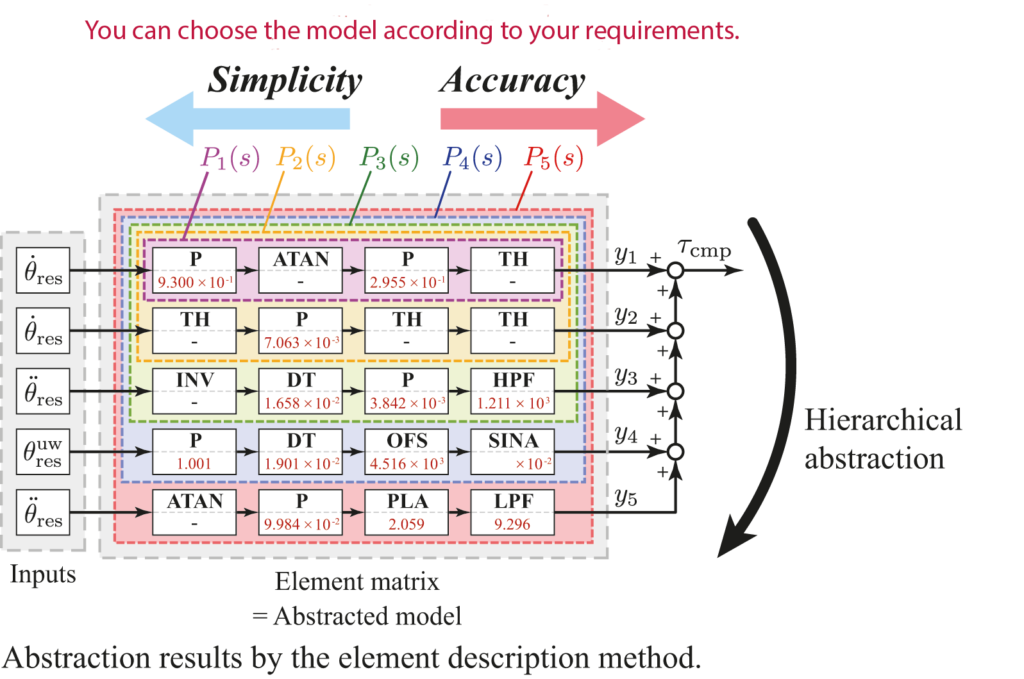
The expansion of the applicable range of robots and machines requires the ability to cooperate with humans and adapt to external environments. It is necessary to use torque information in order to achieve these capabilities. A reaction torque observer is one of the effective methods to obtain torque information because it does not need a torque sensor and it can deal with torque information in the high-frequency domain. However, it needs a correct compensator to reject disturbances to estimate the precise torque. Generally, the disturbance compensator of the reaction torque observer is derived by manual model selection and manual/automatic parameter fitting. This method not only takes time and effort but also does not always obtain an optimal solution because it depends on a predetermined model. In particular, it is well known that nonlinear elements such as friction are difficult to model. To overcome this issue, an automatic design method of a disturbance compensator is proposed in this article. The compensator is abstracted automatically using an element description method. Using the element description method, model design in advance is not needed because the model selection and the parameter fitting are conducted simultaneously. Therefore, the element description method can be applied to systems whose model structure is unknown. In addition, it is possible to input human intentions as initial settings. These features enable designs that make use of human knowledge and the computational power of computers.
Further notes:
Dr. Takeuchi launched a venture company “Abstech Co., Ltd.” in order to apply the element description method to industry. The Abstech has developed Windows applications that model systems using element description methods. If you are interested in this technology, please contact him. <e-mail: issei@abstech.tech>