Composite Adaptive Synchronous Control of Dual-Drive Gantry Stage With Load Movement
Authors: Pengwei Shi, Xinghu Yu, Xuebo Yang, Juan J. Rodríguez-Andina, Weichao Sun, Huijun Gao
Abstract:
In recent years, dual-drive gantry systems have been widely used in precision manufacturing due to their large load and high thrust characteristics. However, the difficulty of controlling the system increases due to various uncertainties and nonlinear perturbations in the system. In particular, it is challenging for gantry systems with load movements to perform synchronization tasks. The reason is that the load causes a change in the center of mass of the mechanical beam, which adversely affects the dynamic balance of the dual-drive system. Existing studies rarely compensate for this by using the known motion information of the load, rather than treating it uniformly as an external perturbation and treating it roughly, which is important for precision synchronous motion control.
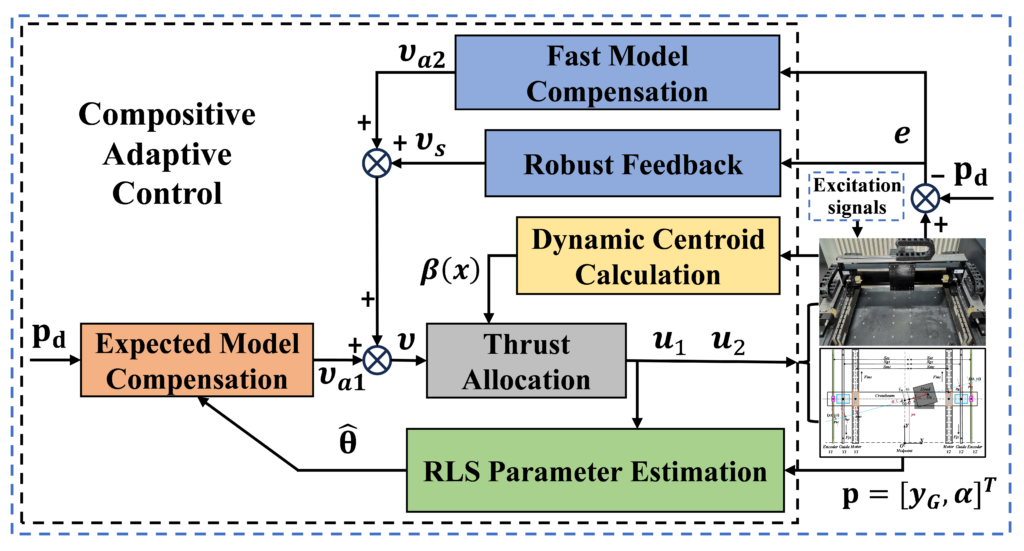
This paper discusses the synchronization control problem of a dual-drive gantry stage with load movement. Considering the rigid-flexible coupling characteristics of gantry mechanical components, a system dynamics model that takes into account both linear feed and rotation modes is proposed. This model contains the actual state of the synchronous motion of the dual-drive gantry system, and specifies the objectives for the controller design. In addition, considering the influence of parameter uncertainty and unknown disturbances, a composite adaptive control framework is designed, which integrates the output tracking performance and parameter estimation algorithms. Compensation is performed through parameter convergence and robust feedback mechanisms to reduce the system’s sensitivity to parameter perturbations and environmental interference. The most important step is to verify the authenticity of the rigid-flexible coupling modes through a few frequency domain identification experiments. Moreover, the estimated relationship between the load position and the beam centroid is established using known information, and the unknown parameter information is solved by frequency domain characteristic analysis and system identification method, which is beneficial to the calculation and distribution of thrust in dual-drive gantry system. Finally, several sets of comparative experiments are designed to validate the effectiveness and superiority of the proposed synchronization control scheme from the data and graphical results.